
Atuadores otimizados
Um sistema automatizado desenvolvido por pesquisadores do MIT projeta e imprime em 3D peças robóticas complexas, chamadas atuadores, otimizadas de acordo com um grande número de especificações.
Embora os atuadores por si sós não sejam revolucionários, o sistema faz automaticamente o que é praticamente impossível para os humanos fazerem.
Atuador é um termo genérico para qualquer tipo de dispositivo que controla mecanicamente um sistema robótico ou automatizado em resposta a sinais elétricos - motores, músculos artificiais etc.
O sistema fabrica atuadores fazendo uma colcha de retalhos de três materiais diferentes, cada um com uma cor clara ou escura diferente e uma propriedade - como flexibilidade e magnetização - que controla o ângulo do atuador em resposta a um sinal de controle.
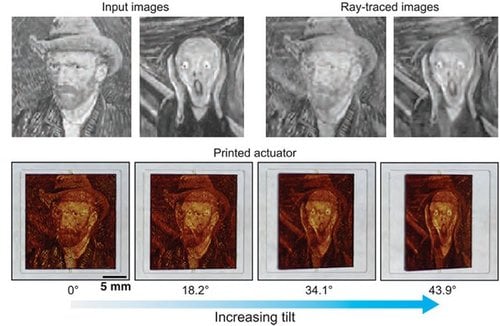
Primeiro, o software divide o projeto do atuador em milhões de píxeis tridimensionais - conhecidos como vóxeis - que podem ser preenchidos com qualquer um dos materiais. Em seguida, ele executa milhões de simulações, preenchendo diferentes vóxeis com diferentes materiais. O sucesso é obtido quando o programa chega na posição ideal de cada material em cada vóxel para gerar duas imagens diferentes em dois ângulos diferentes. Uma impressora 3-D personalizada fabrica o atuador depositando o material correto no vóxel adequado, camada por camada.
Revestimentos para robôs, navios e aviões
Um dos protótipos de demonstração mostra um autorretrato de Vincent van Gogh quando é visto de frente; mas basta incliná-lo ligeiramente para que a imagem do pintor seja substituída pelo quadro O Grito, de Edvard Munch.
Continua depois da publicidade |
As imagens variáveis foram escolhidas para mostrar o que o sistema pode fazer. Mas atuadores otimizados para aparência e função podem ser usados principalmente para a biomimética em robótica - a construção de robôs inspirados em seres vivos.
Por exemplo, outros pesquisadores estão projetando peles robóticas subaquáticas usando matrizes de atuadores destinadas a imitar os dentículos da pele dos tubarões. Os dentículos coletivamente se deformam para diminuir o arrasto para uma natação mais rápida e silenciosa.
"Você pode imaginar robôs submarinos com matrizes inteiras de atuadores cobrindo a superfície de suas peles, que podem ser otimizadas para arrastar e girar com eficiência, e assim por diante," disse o pesquisador Subramanian Sundaram.
Ele cita outras possibilidades, como coberturas para asas de aviões, que poderão alterar as próprias características para beneficiar a velocidade, durante o voo de cruzeiro, ou a sustentação, durante o pouso e a decolagem.
"Ainda não podemos imprimir asas ou qualquer coisa nessa escala, ou com esses materiais. Mas acredito que este é o primeiro passo em direção a esse objetivo," ressalva ele.
Gostou? Então compartilhe:

